产品概述
输电线路智能激光雷达监测装置采用枪机与激光雷达一体化的设计结构,融入非重复扫描激光雷达传感器,通过一体化装置集成技术、多传感器数据融合技术、大数据平台智能管理技术,设计了激光雷达实时三维重构输电隐患精确测距装置与可视化预警系统,解决输电通道车辆、树木生长、地形变化及导线弧垂等隐患一体化监测难点,实现了输电通道视场三维重构、输电隐患精细化及可视化预警管理。
一、设计需求
禁飞区点云数据采集、外破易发区隐患测距及地形变化识别、树线矛盾区树障测高、弧垂高精度无接触监测。
二、产品功能
1.多光融合,多元分析:普光、夜视、激光雷达一体化设计,可见光+激光边端融合分析,外破隐患目标精确测距及分级告警,树障识别、弧垂监测、地形变化识别;
2.边端扫描,实景修正:设备搭载激光雷达定时扫描当前场景,比对历史场景三维信息,修正当前场景三维信息,保证三维建模精度;
3.三维融合,高精测距:依据当前场景点云数据建立三维模型,结合设备抓拍的二维图片,进行融合标定,在发现隐患的同时测算出隐患距离,使隐患具象化;
4.外破易发区-隐患精确测距及地形变化识别:针对吊车、挖掘机、推土机、泵车和桩机等各类施工车辆,先实现可见光图像准确识别,再根据采集到的激光雷达点云数据进行三维空间的距离测算及分级告警。可见光识别隐患后,可联动点云枪机激光雷达触发扫描,与历史点云数据做对比,实现地形变化的有效判断;
5.树线矛盾区-树障精确测高:利用点云枪机激光雷达定时扫描通道点云,实时更新点云数据,对关键部位的树木距导线距离进行实时测量,掌握现场树木生长对导线的影响情况;
6.弧垂重点监测区-高精度监测,无需停电,简化安装:通过点云枪机激光雷达采集导线数据,做数据建模,结合导线两侧弧高数据,实现导线对地距离和弧垂距离的高精度计算。经与无人机点云数据对比验证,点云枪机精度远超传感器测弧垂方案精度。
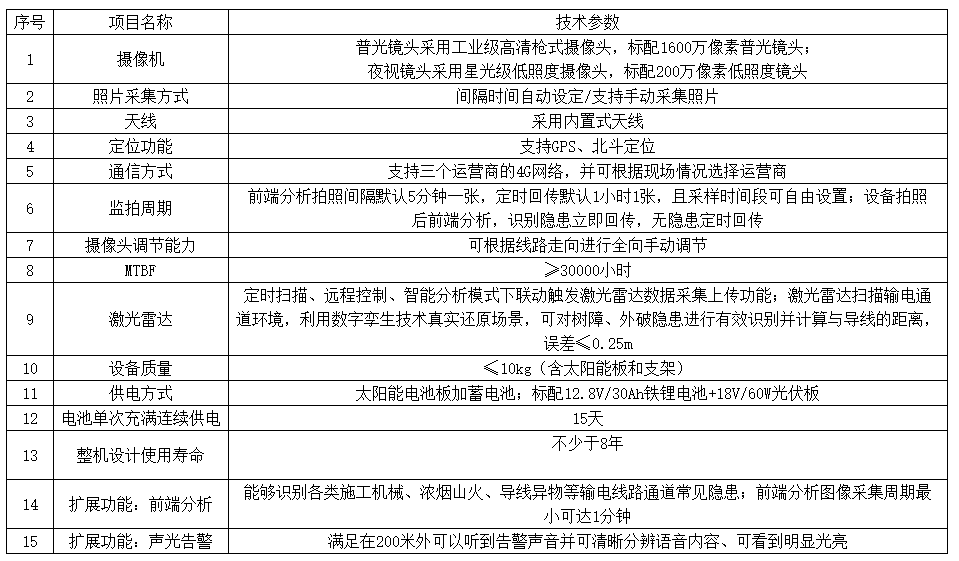
三、产品参数